本文通过将图片和代码结合的方式,讲解目标检测算法中常用的 IoU 损失函数。
本文内容
- IoU(Intersection over Union)
- GIoU(Generalized-IoU)
- DIoU(Distance-IoU)
- CIoU(Complete-IoU)
- YOLOv8 中的实现
在计算对象检测评估指标 mAP(平均精度,mean Average Precision)时,计算 IoU(Intersection over Union)是非常关键的一步。因此,在训练过程中,常用 IoU (或者变体)作为损失函数的一部分。
IoU(Intersection over Union)
论文:UnitBox: An Advanced Object Detection Network (2016.08,UIUC、旷视)
后面的图示说明:
- 红色边框为 Groud Truth 框(简称 GT)
- 蓝色边框为预测的框。
IoU 衡量了两个边界框的交集区域与并集区域的比例,计算公式如下:
显然,,当没有重叠区域时取 0,当 GT 和预测框重叠时取 1。
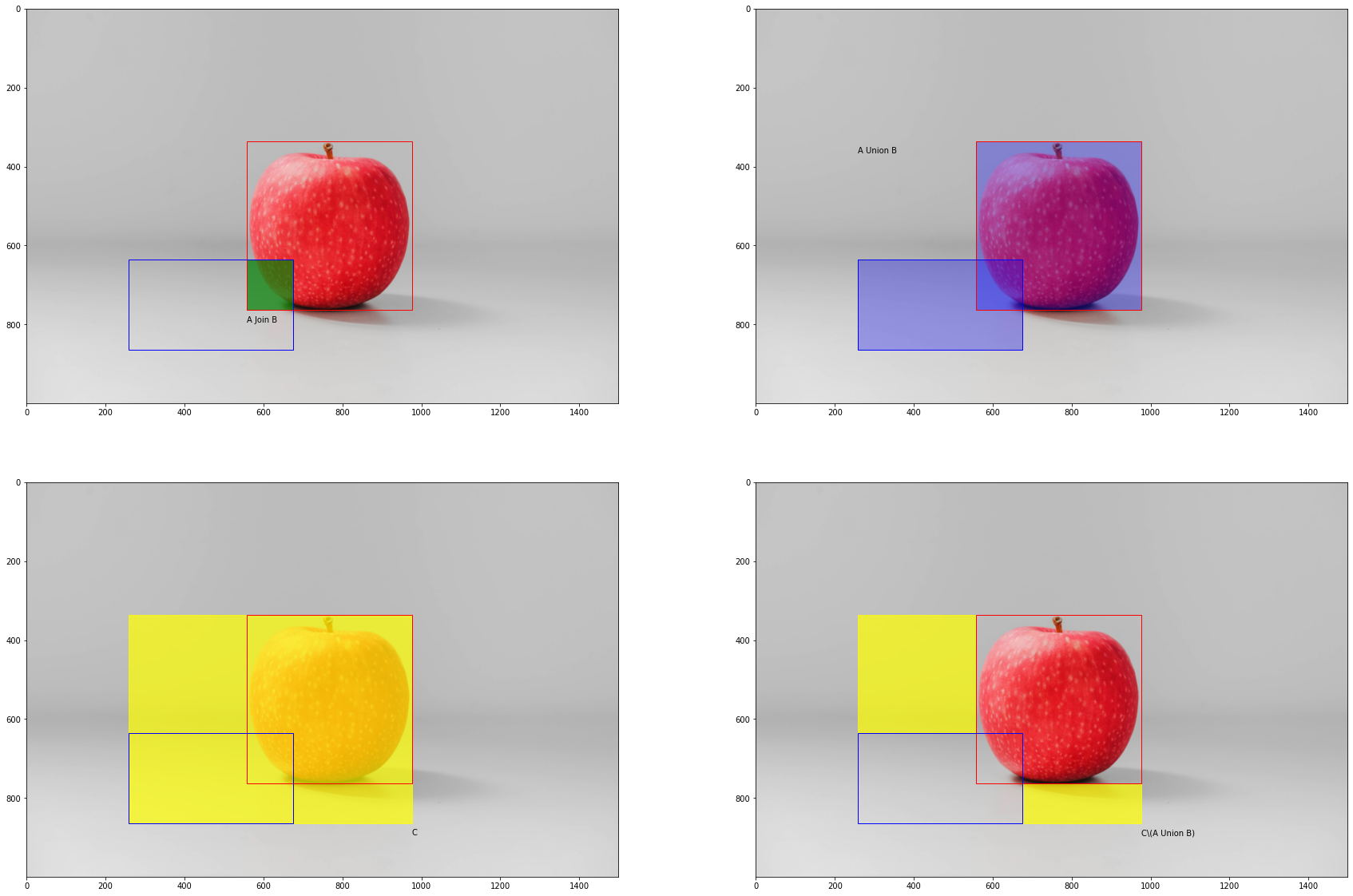 图 1:左上为交集 ,右上为并集 ,左下为 GIoU 中定义的最小覆盖矩形 ,右下为 GIoU 中定义的补集 。
图 1:左上为交集 ,右上为并集 ,左下为 GIoU 中定义的最小覆盖矩形 ,右下为 GIoU 中定义的补集 。
以图 1 为例,IoU 即左上图的绿色填充面积除以右上的淡蓝色填充面积。
各种不同情况下,IoU 的值,如下图:
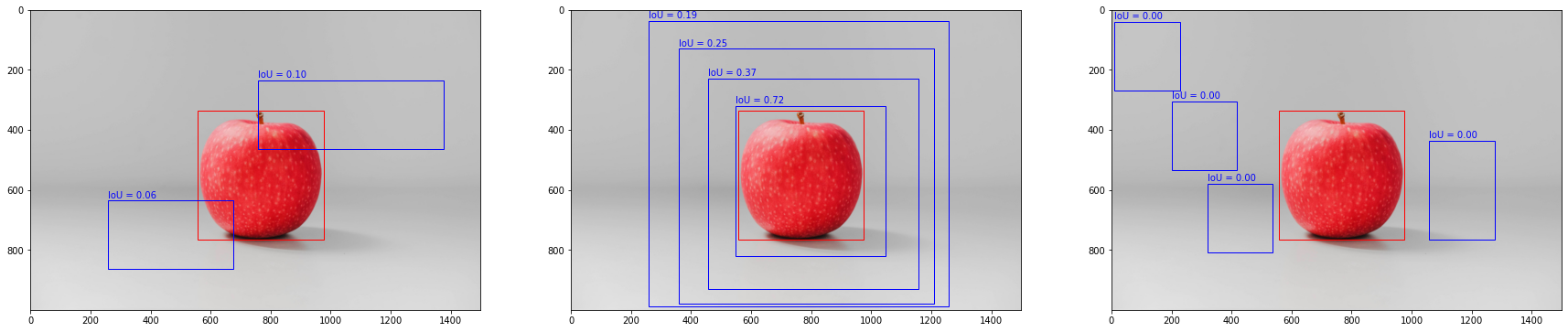 图 2:从右图可以看出,对于不相交但是距离有很大差异的情况,IoU 都为 0,故 IoU 对这种情况不能高效收敛。
图 2:从右图可以看出,对于不相交但是距离有很大差异的情况,IoU 都为 0,故 IoU 对这种情况不能高效收敛。
损失函数的计算(后续 GIoU、DIoU、CIoU 类同):
根据 IoU 的取值范围推算,
【IoU 作为损失函数的不足】
- 如果两个框没有相交,根据定义,IoU=0,不能反映两者的距离大小(重合度)。
- 对于框不相交的情况,loss=0,没有梯度回传,无法进行学习训练。(如图2 右图所示)
GIoU(Generalized-IoU)
GIoU 解决了如上 IoU 的不足(两个框不相交的情况)。
论文:Generalized Intersection over Union: A Metric and A Loss for Bounding Box
Regression (2019.02,斯坦福)
计算公式如下,其中 IoU 的公式和上面相同,C 为 能框住 A、B 的最小矩形。
显然,,故 GIoU 的取值范围为 ,继而损失函数 。
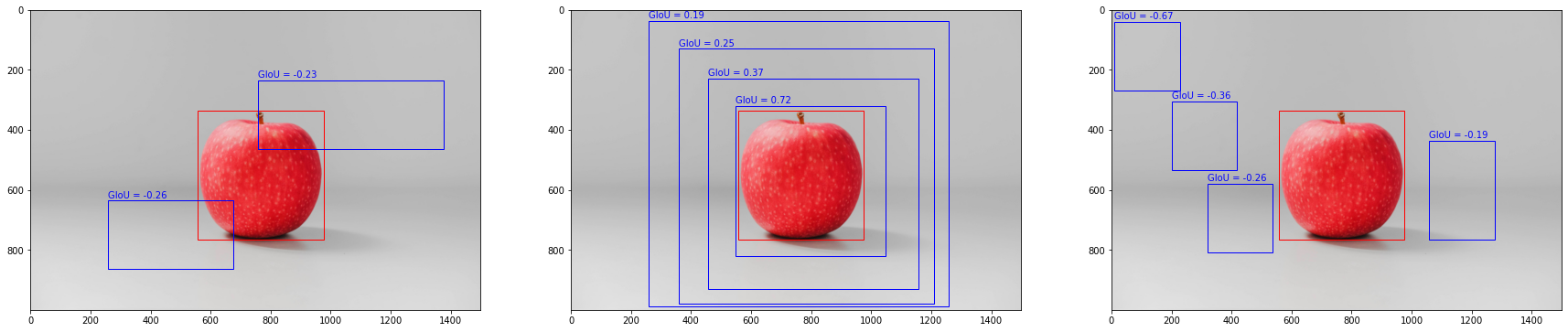 图3:对比图 2,从右图可以看出,GIoU 较好地解决了不相交情况下的距离问题;从中图可以看出,当预测框和 GT 框之间有包含关系时,GIoU 和 IoU 取值相同。
图3:对比图 2,从右图可以看出,GIoU 较好地解决了不相交情况下的距离问题;从中图可以看出,当预测框和 GT 框之间有包含关系时,GIoU 和 IoU 取值相同。
【GIoU 作为损失函数的不足】
- 在两个预测框有包含关系时,GIoU就退化为IoU,不能反映位置关系。(如图 3 中,图 6-2)
DIoU(Distance-IoU)
为了解决 GIoU 上面的问题,DIoU 通过两个中心点距离和对角线的比值来衡量框的距离关系。这样同时解决了不相交和框包含两种情形下的问题(当然不止于此)。
论文:Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression (2019.11,天津大学)
 图 4a 边界框回归的 DIoU 损失,其中可以直接最小化中心点之间的归一化距离。c 是覆盖两个框的最小封闭框的对角线长度,d 是两个框的中心点之间的距离。
图 4a 边界框回归的 DIoU 损失,其中可以直接最小化中心点之间的归一化距离。c 是覆盖两个框的最小封闭框的对角线长度,d 是两个框的中心点之间的距离。
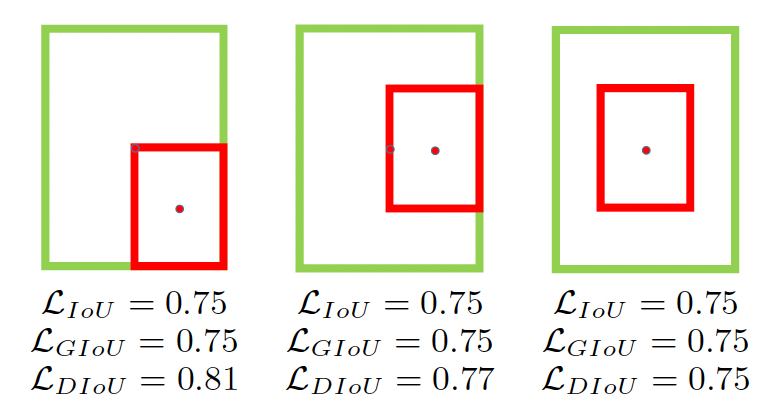 图 4b 论文中的示例。GIoU损失降级为IoU损失,DIoU损失仍然可以区分。绿色和红色分别表示目标框和预测框。
图 4b 论文中的示例。GIoU损失降级为IoU损失,DIoU损失仍然可以区分。绿色和红色分别表示目标框和预测框。
公式如下:
其中 和 分别为预测值和 GT 中心点的坐标, 为欧几里得距离, 同 GIoU 中 C 的对角线长度。
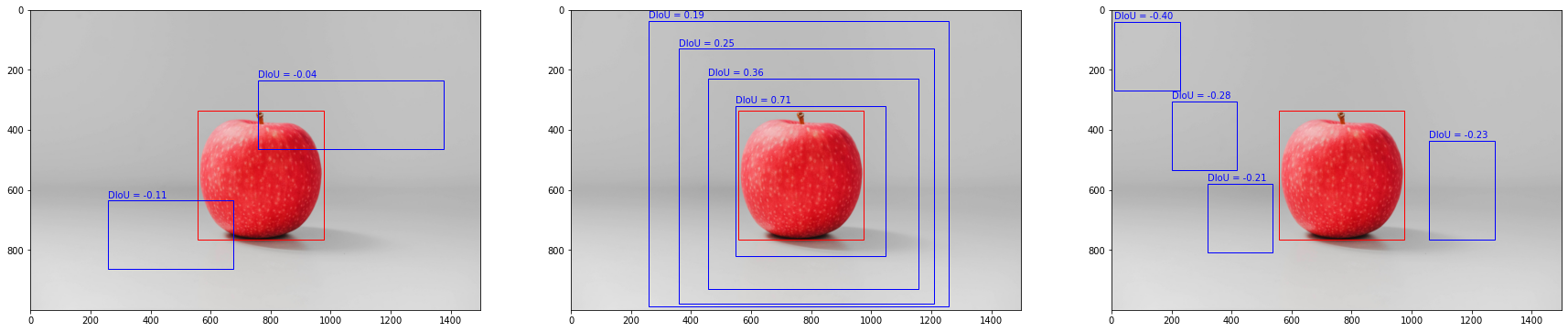 图 5:DIoU 取值示例
图 5:DIoU 取值示例
对比 GIoU看,对于预测框在 GT 框内的情况,GIoU 无法区分,但是,考虑中心点距离后,DIoU 可以较好地解决。
 图 6:DIoU 考虑了中心点距离和对角线之比,从第2、3图的对比可以看出,DIoU 相比 GIoU,可以表征两个框中心点的距离关系
图 6:DIoU 考虑了中心点距离和对角线之比,从第2、3图的对比可以看出,DIoU 相比 GIoU,可以表征两个框中心点的距离关系
CIoU(Complete-IoU)
论文和 DIoU 相同。
边界框回归的良好损失应考虑三个重要几何因素,即重叠区域、中心点距离和纵横比。原生的 IoU 损失考虑了重叠区域,GIoU 的损失在很大程度上依赖于 IoU 损失。DIoU损失同时的重叠面积和中心点距离边界框。CIoU损失在DIoU 的基础上,增加了纵横比的一致性要求。
v 可以理解为,在一个单位圆上,两个框的长、宽构成的角度形成的弧的差异。
对比 DIoU看,对于预测框在 GT 框内,中心点距离相同,形状不同的情况,DIoU 无法区分,但是,考虑形状的长宽对比后,CIoU 可以较好地解决。
 图 7:CIoU 考虑了框的长宽比例
图 7:CIoU 考虑了框的长宽比例
YOLOv8 中的实现
IoU 的计算代码非常简洁,如下为 YOLOv8 中的完整代码实现。
import math
import torch
def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7):
"""
Calculate Intersection over Union (IoU) of box1(1, 4) to box2(n, 4).
xywh格式的x,y为中心点坐标
Args:
box1 (torch.Tensor): A tensor representing a single bounding box with shape (1, 4).
box2 (torch.Tensor): A tensor representing n bounding boxes with shape (n, 4).
xywh (bool, optional): If True, input boxes are in (x, y, w, h) format. If False, input boxes are in
(x1, y1, x2, y2) format. Defaults to True.
GIoU (bool, optional): If True, calculate Generalized IoU. Defaults to False.
DIoU (bool, optional): If True, calculate Distance IoU. Defaults to False.
CIoU (bool, optional): If True, calculate Complete IoU. Defaults to False.
eps (float, optional): A small value to avoid division by zero. Defaults to 1e-7.
Returns:
(torch.Tensor): IoU, GIoU, DIoU, or CIoU values depending on the specified flags.
"""
# Get the coordinates of bounding boxes
if xywh: # transform from xywh to xyxy
(x1, y1, w1, h1), (x2, y2, w2, h2) = box1.chunk(4, -1), box2.chunk(4, -1)
w1_, h1_, w2_, h2_ = w1 / 2, h1 / 2, w2 / 2, h2 / 2
b1_x1, b1_x2, b1_y1, b1_y2 = x1 - w1_, x1 + w1_, y1 - h1_, y1 + h1_
b2_x1, b2_x2, b2_y1, b2_y2 = x2 - w2_, x2 + w2_, y2 - h2_, y2 + h2_
else: # x1, y1, x2, y2 = box1
b1_x1, b1_y1, b1_x2, b1_y2 = box1.chunk(4, -1)
b2_x1, b2_y1, b2_x2, b2_y2 = box2.chunk(4, -1)
w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps
w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps
# Intersection area
inter = (b1_x2.minimum(b2_x2) - b1_x1.maximum(b2_x1)).clamp_(0) * \
(b1_y2.minimum(b2_y2) - b1_y1.maximum(b2_y1)).clamp_(0)
# Union Area
union = w1 * h1 + w2 * h2 - inter + eps
# IoU
iou = inter / union
if CIoU or DIoU or GIoU:
cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width
ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height
if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1
c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared
rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center dist ** 2
if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47
v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)
with torch.no_grad():
alpha = v / (v - iou + (1 + eps))
return iou - (rho2 / c2 + v * alpha) # CIoU
return iou - rho2 / c2 # DIoU
c_area = cw * ch + eps # convex area
return iou - (c_area - union) / c_area # GIoU https://arxiv.org/pdf/1902.09630.pdf
return iou # IoU
发布于:2023-11-20 10:18:58 描述有误?我来纠错